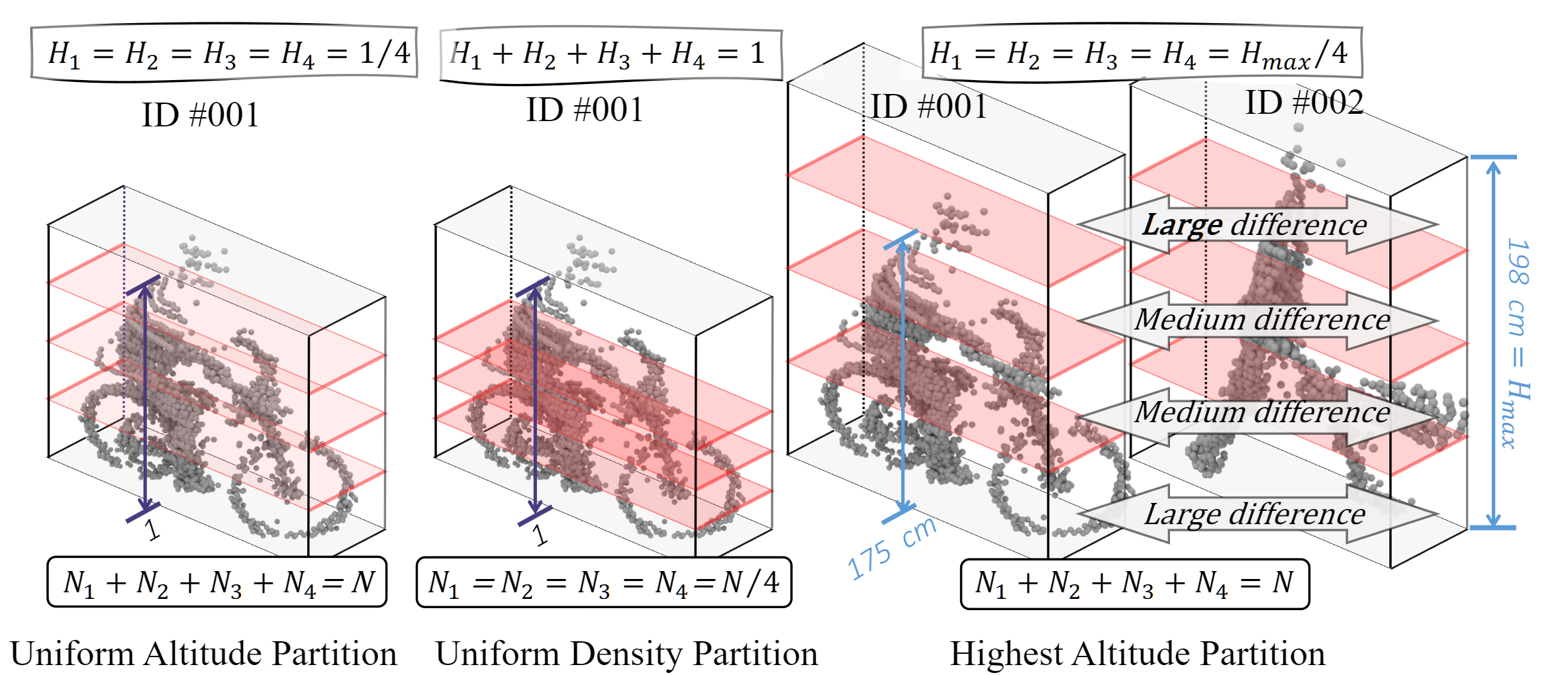
Size-aware Point Partitioning
Point clouds have gained growing interest in gait recognition. However, current methods, which typically convert point clouds into 3D voxels, often fail to extract essential gait-specific features.
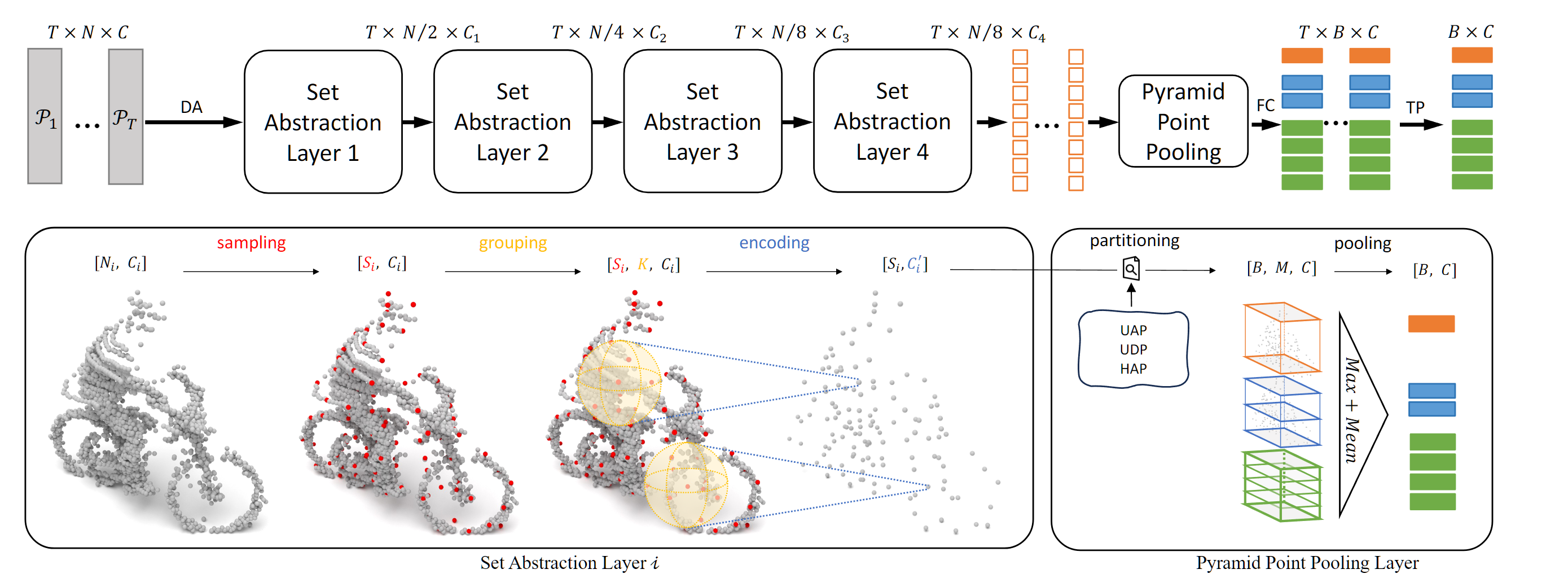
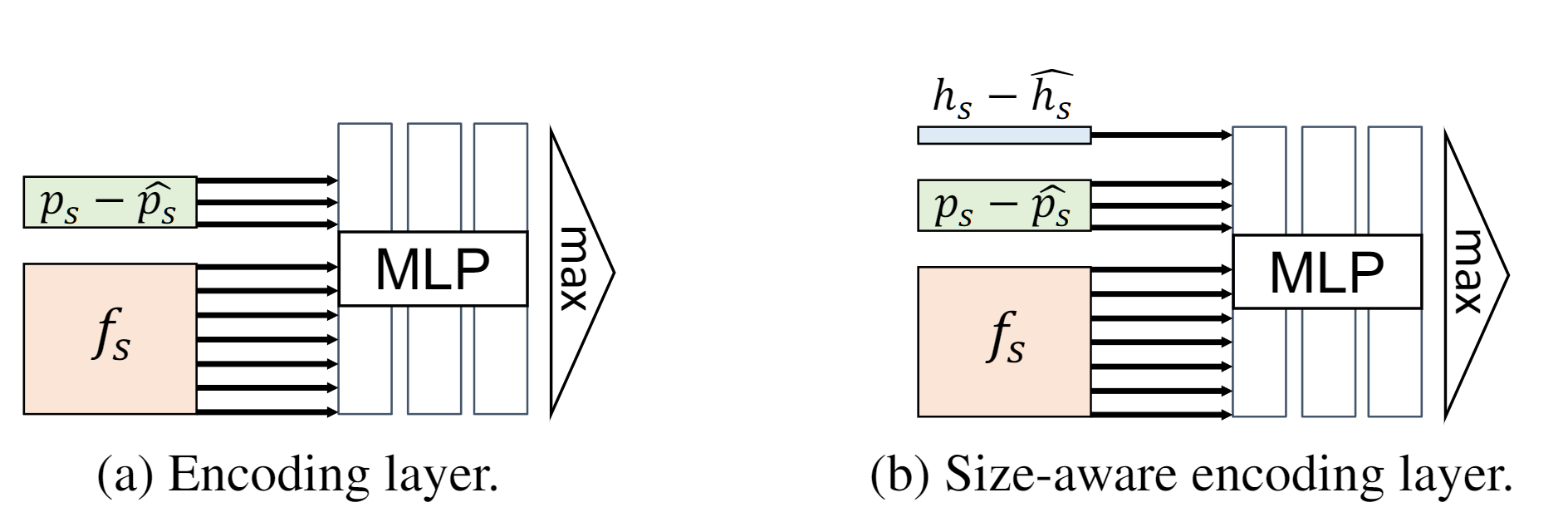
In this paper, we explore gait recognition within 3D point clouds from the perspectives of architectural designs and gait representation modeling. We indicate the significance of local and body size features in 3D gait recognition and introduce LidarGait++, a novel framework combining advanced local representation learning techniques with a novel size-aware learning mechanism. Specifically, LidarGait++ utilizes Set Abstraction (SA) layer and Pyramid Point Pooling (P^3) layer for learning locally fine-grained gait representations from 3D point clouds directly. Both the SA and P^3 layers can be further enhanced with size-aware learning to make the model aware of the actual size of the subjects.
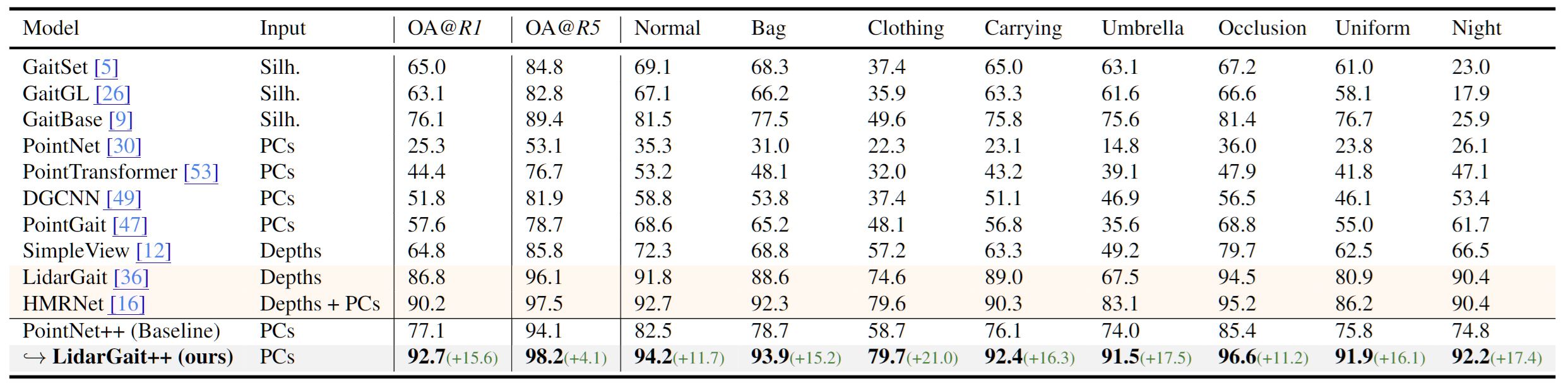
In the end, LidarGait++ not only outperforms current state-of-the-art methods, but it also consistently demonstrates robust performance and great generalizability on two benchmarks. Our extensive experiments validate the effectiveness of size and local features in 3D gait recognition.

@InProceedings{Shen_2023_CVPR,
author = {Shen, Chuanfu and Fan, Chao and Wu, Wei and Wang, Rui and Huang, George Q. and Yu, Shiqi},
title = {LidarGait: Benchmarking 3D Gait Recognition With Point Clouds},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2023},
pages = {1054-1063}
}@inproceedings{shen2025lidargait++,
title={LidarGait++: Learning Local Features and Size Awareness from LiDAR Point Clouds for 3D Gait Recognition},
author={Shen, Chuanfu and Wang, Rui and Duan, Lixin and Yu, Shiqi},
booktitle={Proceedings of the Computer Vision and Pattern Recognition Conference},
pages={6627--6636},
year={2025}
}